智驾进城,没有银子弹
聚光灯持续扫射着智能电动车产业,难免留有 " 盲区 ",它可能很快就到来,但未被发觉,可能长久未变,但依然主导规则,我们称之为 " 未来之见 "" 未知之见 ",这就是我们 "PowerOn 未见 " 栏目的由来,致力于呈现汽车产业的关键 " 盲区 "。
作者|李安琪
编辑|李勤
" 这个东西不能叫 NAD(蔚来自动驾驶)。"
今年 7 月,蔚来 CEO 李斌在上海城区道路体验了自家最新的智驾功能,他略显失望。蔚来 NAD 类似于特斯拉的 FSD(Full Self Driving),目标是实现城市和高速道路的点到点辅助驾驶。
年初,蔚来智能驾驶团队集结了一批人力,目标是上半年在上海数千公里城市道路实现领航辅助驾驶功能,但研发没有达到预期。据 36 氪 PowerOn 了解,蔚来智驾团队已经立下 " 军令状 "," 每半个月更新一个版本。"
蔚来陷入焦虑,并非没有道理。一场比拼资源、人力、速度与规模的城市 NoA(Navigate on Autopilot,领航辅助驾驶)之战,已经硝烟四起。
先是数字竞赛。华为、小鹏将今年城市 NoA 的开放目标分别定在了 45 城与 50 城,理想汽车则直接给出了 100 城的激进目标。
开城策略也针锋相对。小鹏汽车接连在理想总部所在地北京,推动城市 NoA 落地,而据 PowerOn 了解,理想则计划将城市 NoA 首个落地城市设定为广州——小鹏汽车大本营。
国内的城市 NoA 开城竞赛,甚至把压力传导给了特斯拉,后者正积极筹备全自动驾驶功能 FSD 入华落地。一位知情人士向 PowerOn 透露,这正是由特斯拉中国销售团队发起的申请," 希望美国总部尽快支持 "。
汽车行业正从产品空间、价格、供应链等方面开展全面竞赛,但智能化尤其是智能驾驶,是新造车公司们最大的差异化竞争点。
这也迫使城市 NoA 成为行业为数不多的 " 一把手 " 项目。据 PowerOn 了解,理想 100 城的开城目标是由李想本人敲定;而小鹏智驾灵魂人物吴新宙离职后,何小鹏也在带领智驾团队开展工作。
但激进的宣传目标,无法掩盖城市 NoA 开城的艰难。截止目前,小鹏城市 NGP 的实际落地只推进到北京、上海、广州、深圳、佛山 5 个城市,华为的落地节奏相当,两者都还依赖高精地图;而理想和蔚来的城市 NoA 功能,尚未正式交付。
从高速到城市道路,城市 NoA 的落地仍面临重重困难,尤其在去掉高精地图后,城市 NoA 正面临一次感知危机,即如何重新认识眼前的世界。
去掉高精地图,智能驾驶的感知危机
有高精地图这把 " 拐杖 ",智能汽车通过十字路口几乎没有困难,因为高精地图会告诉汽车需要的一切静态道路信息,包括该走哪条车道、车道线在哪里、转弯还是直行、红绿灯位置,是不是有待转区、限速多少等等。
但高精地图的缺点也很明显:难以负荷的成本、鲜度不足,以及政策不确定性等。车企要快速推广城市 NoA 功能,从 1 个城市开通到 100 个城市,就不得不舍弃高精地图这把 " 拐杖 "。
拿掉高精地图这套精密的数字工具,汽车将进入一片稀疏的荒漠,只能用自身的感知能力重建一个环境模型。
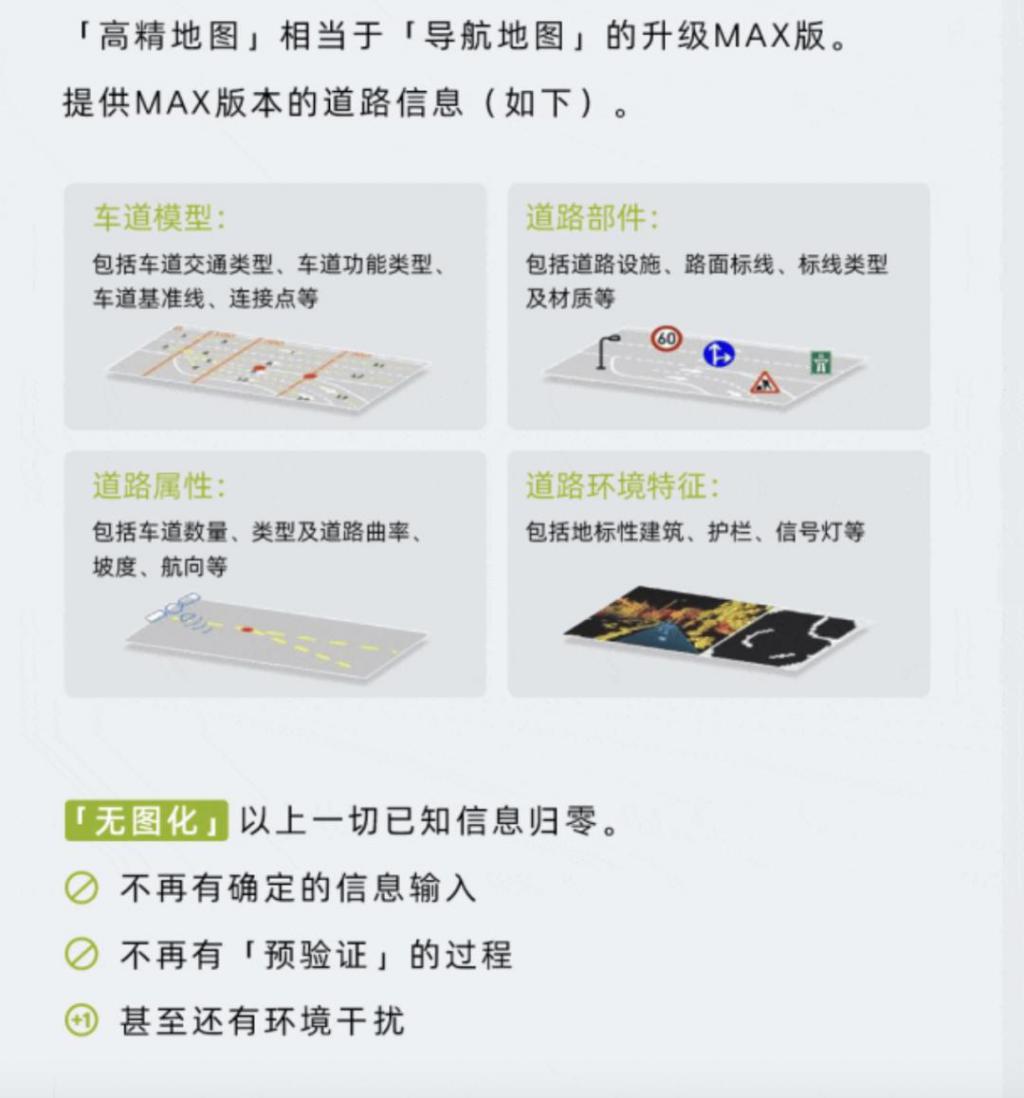
去掉高精地图的挑战,图源:小鹏汽车
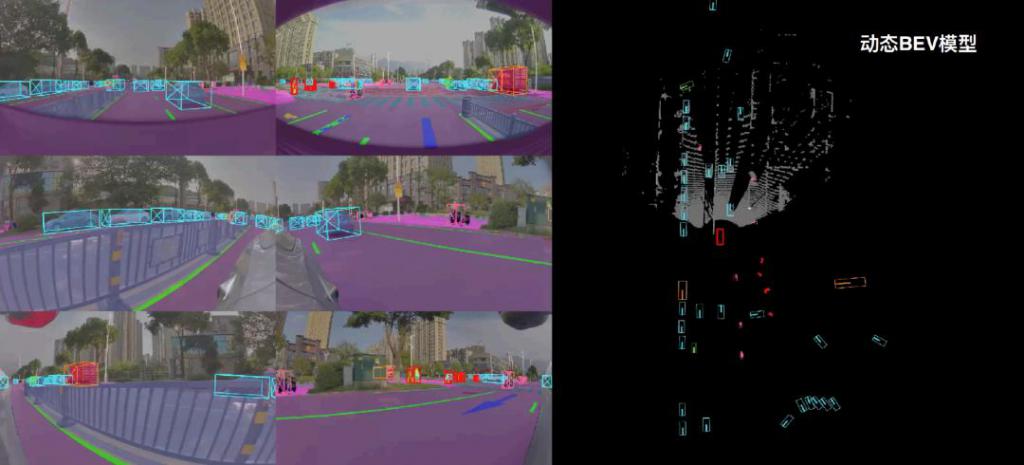
特斯拉还是那个领头羊,其在 2021 年开始重建感知系统,先后推出了基于 Transformer 模型的 BEV(即 Bird's Eye View,鸟瞰图)和 Occupancy network(占据栅格)等技术。
就像人用眼睛看世界一样,BEV 能将 2D 图像转换成 3D 立体空间,此外,BEV+Transformer 还能够识别静态车道线,提供车道线边缘,虚实车道线等信息;而动态层面,Occupancy 网络则用以识别异型障碍物,如施工场景中的锥桶等。
"BEV 这套方案的上限非常高,能让车辆像人类一样去看这个世界,基本是自动驾驶的终局方案。" 有头部车企的高级工程师向 PowerOn 断言。
换句话说,在去掉高精地图之后,BEV+Transformer+Occupancy,为智驾系统生成了一幅实时地图。
BEV+Transformer 的感知世界,图源:理想汽车
PowerOn 从接近特斯拉工程团队的人士处获悉,基于新的感知方案,特斯拉 FSD 功能已经释放给上百万辆汽车,在无需高精地图的情况下,特斯拉 FSD 的百公里接管率已经低至 1.6-1.7," 这是一个强调舒适性的标准。"
由此,特斯拉已经率先验证了 BEV+Transformer+Occupancy" 去图三件套 " 的可行性,国内的小鹏、华为、蔚来、理想等公司,也全部跟进。
不过,这套感知方案天花板虽然高,却不好驾驭,尤其是国内公司刚切入这条路线。以简单的车道线信息为例,原本借助高精地图,可以轻易获得,但用 BEV+Transformer 去实时感知,则是完全不同的境况。
比如,路口排队通行时,车道线经常被前方车辆遮挡,智驾系统如果跟着前车行驶,但走了一会儿发现其实没有车道线,就会出现摇摆。
" 这会导致车辆行驶忽左忽右,体验很不好。" 有工程师告诉 PowerOn,智驾体验最直接的并不是感知,而是规划控制," 起码坐上车不会乱晃。"
同样,也可能因为光线太强,摄像头对车道线的感知不够清晰,又或者是路面施工造成的车道线遮挡……这些都可能让智能汽车在城市道路上 " 抓瞎 "。
而相比识别被遮挡的车道线,识别红绿灯路口的难度更是直线拉升。
此前不管是特斯拉,还是国内的理想、蔚来和小鹏等,高阶智能驾驶都针对高速道路,红绿灯路口难免被忽视。而争相交付城市 NoA 的过程中,这些车企才发现,如何通过红绿灯路口是个两难问题。
理想汽车智驾副总裁郎咸鹏曾系统分享过:如果借助高精地图通过红绿灯路口,车辆对红绿灯识别和检测需要跟高精地图、高精定位做匹配,如果识别的红绿灯与高精地图匹配不上,就会感知失败;
而如果去掉高精地图,红绿灯类型又千变万化,位置摆放各异,如何只靠摄像头去准确识别,并且跟自车道相对应,同样艰难。
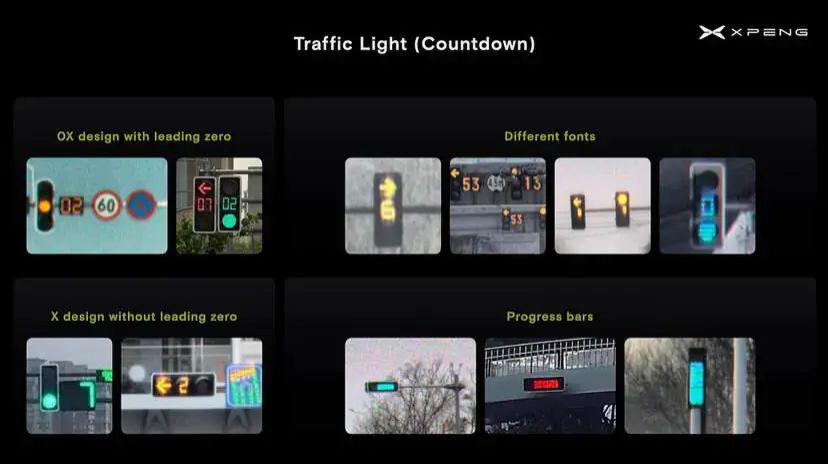
复杂的红绿灯案例,图源:小鹏汽车
一位小鹏汽车工程师向 PowerOn 直言,红绿灯确实不好做," 去年公司红绿灯团队被骂得很惨。"
识别被遮挡的车道、通过复杂的大型路口、认出形形色色的红绿灯等,都是智能驾驶开城必须攻克的难关。而对于想要加速超车的公司而言,似乎要找到一条快速路。
新技术,口水仗
过往,理想汽车的智能驾驶进展,经常被当作 " 差班生 "。虽然其高速 NoA 功能落地并不慢,但相较于蔚来和小鹏,理想的智驾投入的确保守,就在 2022 年,小鹏和蔚来的智驾团队均超过 800 人,而理想汽车仅维持在 500 人左右。
但今年开始,理想汽车忽然有了一举赶超的势头,团队快速扩张至 800 人左右,喊出无图版城市 NoA" 年内开通 100 城 " 的目标。激进转身引发了同行侧目,招致蔚来智驾产品负责人黄鑫的隔空质疑。
是什么让理想汽车有了从队尾大步走向队首的底气?
今年 5 月家庭科技日上,理想公布了城市 NoA 方案,除了行业标配的 " 去图三大件 ":BEV+Transformer+Occupancy,理想还有两个 " 独门 " 神经网络:NPN(神经先验网络),针对车道线被遮挡和复杂路口等场景;TIN(信号灯通行意图网络),针对红绿灯路口。
不难看出,两个神经网络解决的正是城区智能驾驶遇到的顽疾。比如 NPN 能够对复杂路口的感知数据进行特征提取和存储,生成道路特征。等车辆下一次行驶到同样路口时,NPN 提供的道路特征就可以与车端 BEV 感知进行融合,得到更准确的感知结果。
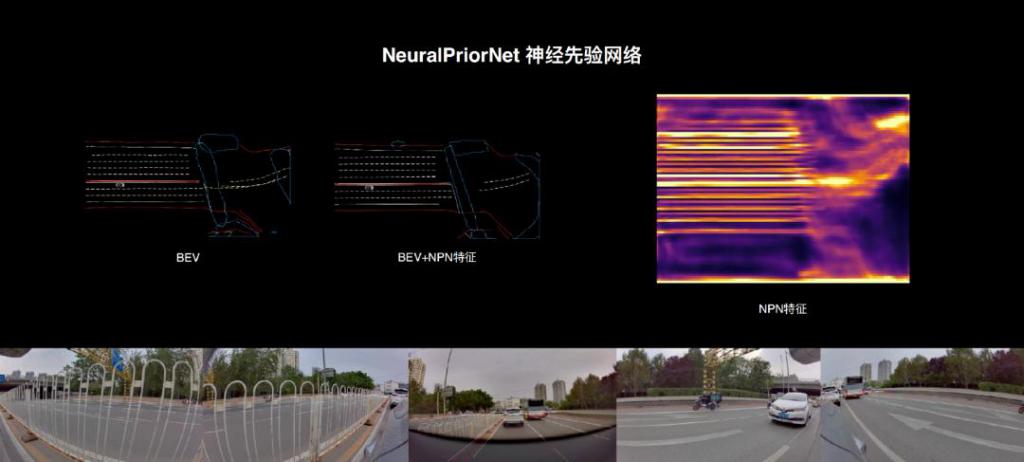
人眼无法看懂的道路 NPN 特征,图源:理想汽车
从功能来看,NPN 网络的作用类似于高精地图(可以提供道线,路沿、交通标志等信息),给车辆提供先验性的道路特征信息,但其巧妙之处在于,这些道路特征都被转化成了神经网络的参数值,以一种加密的方式提供给 BEV 算法,从而规避了地图测绘的监管风险。
有地图从业人士告诉 PowerOn,从技术来看,NPN 网络的保密性已经远超测绘保密要求,商业方面,NPN 也密切耦合理想特定的 BEV 算法,即便是别家车企拿到了也不知道怎么使用,"NPN 给到小鹏的 BEV 算法,肯定是看不懂的,但如果是高精地图的话,小鹏就能看懂。"
这就相当于装了一个加密的 " 道路信息外挂 ",在遇到复杂路口、雨雪天气和车道线被遮挡的棘手场面时,理想汽车可以调取和查看这个 " 外挂 ",更从容应对。
但从技术逻辑来看,NPN 网络的短板也不容忽视,因其主要从车辆的历史行车数据中提取道路特征,也就自然面临着信息的 " 鲜度 " 问题:如果某个路口车辆没开过,NPN 就无从做道路特征提取;如果路口经常变化,NPN 特征提取也可能滞后。
甚至有车企高级工程师向 PowerOn 直言,"NPN 网络本质是解决了高精地图信息的合规性问题,但对于感知技术本身的落地工程化,帮助有限。"
而理想汽车工程团队显然已有筹谋,据该团队人士透露,理想汽车到 2025 年的规划中,会逐步缩小 NPN 网络的应用范围," 最后只在很个别场景才去用。"
针对城市道路的另一个挑战——红绿灯路口通行,理想也提出了 TIN 信号灯通行意图网络方案。不像传统方案那样检测红绿灯的具体状态,TIN 主要通过历史图像数据,如路口图像和车辆本身的油门刹车数据,学习红绿灯和车辆行驶意图的对应关系。最终 TIN 网络就能直接给出左转、右转、直行、停止 4 个红绿灯状态概率值,比如绿灯概率值最高为 75%,那么车辆就会选择直行。

理想的信号灯识别方案,图源:理想汽车
同样有长期攻克红绿灯路口的工程师向 PowerOn 表达了质疑,有些红绿灯类型整个城市可能就一两个,全国也可能就不到 10 个,而想用十几个案例就教会神经网络,这对于当下技术而言,几乎难以实现。
虽然理想的两个 " 外挂 " 式神经网络引起了不少争议,但针对车道线被遮挡、复杂路口和红绿灯,行业并没有其他的有效方案。大部分都是苦功夫。
有小鹏人士告诉 PowerOn,遇到被遮挡的车道线,内部的解题思路是,图像回传后标注团队会把车道线补充完整,让感知模型学习,训练数据多了之后,感知系统自己也能 " 脑补 " 出车道线。
不过,系统 " 脑补 " 错误的情况也会存在,比如模型无中生有预测出一条车道线来。而在红绿灯检测方面,如果主路红绿灯被遮挡的话,小鹏智驾可能会去看辅路的红绿灯。
要说理想的方案没有引发行业思考是假的。有知情人士告诉 PowerOn,小鹏内部也在研发类似理想 NPN 的方案,通过感知能力和一些轻量化的元素,做复杂路口的结构化信息," 但会更加轻量化。"
驯化新的感知系统是一个长期过程。小鹏智驾内部甚至用 " 炼丹 " 来比喻感知模块的训练,团队经常开玩笑说," 如果这是一个感知的问题,那就要把炉子捡起来,开始炼丹了。"
开城,没有银子弹
即便是给出了去图方案的特斯拉,也不是部署一个技术框架,就可以高枕无忧。算法模型的搭建完成,只是智能驾驶大厦的地基,往后则是不断的测试和优化。
甚至越是用到 BEV+Transformer 这样的端到端模型,越需要大量的参数调整和优化。接近特斯拉工程团队的人士告诉 PowerOn,即便是特斯拉," 也需要加一定的 restriction (加一些规则逻辑的代码)来进行辅助。"
此外,算法模型的每一次训练和优化,都是一个耗时耗资的大工程。
一位小鹏人士向 PowerOn 表示,通常为保证模型的效果,研发团队在前期会将模型做的很重,比如将感知精度推得很高。而算法优化,就是在保证感知精度不被降低的前提下,砍掉模型中无用的参数,并将算法塞进算力受限的计算平台,尽可能减少对算力的消耗," 剪枝、量化、软件部署,每一步都要做很多工作。"
而由于数据量庞大,每一次的算法训练都是一笔巨大消耗,从喂养数据到一个可用的模型," 一次训练要好几天,花费几百万元。"
除了一遍遍优化算法,还要在实际道路上进行无数次软件测试,这也是智驾落地过程中的最枯燥的 "dirty work"。
有业内人士向 PowerOn 介绍了智驾落地的大致流程:针对目标城市,测试工程师们往往要拿整体方案进行路测,每天在车内坐上十来个小时,起码十数台车起码跑半个月以上,才能积累特殊路况。
然后通过修改算法解决特殊问题、迭代模型,但新的模型并不一定能顺利解决问题," 可能 10 个问题只解决了 5 个,只能不断去测,反复下来,一个城市的问题解决可能要三个月。"
随着落地规模越大,车企需要建立一个更加庞大的数据闭环系统,涵盖数据挖掘、主动学习、自动标注、模型调试、测试验证、模型发布等环节。最重要的是,数据闭环要能够经受数十万甚至百万车回传的数据冲刷,才能真正形成数据驱动,让车辆具备自主进化的能力。
因此,饶是落地经验相对丰富的小鹏汽车,开城速度也没有想象中快。" 现在还没有成熟的流水线开城模式,只能是先翻一个山头,再翻一个山头。" 一位小鹏汽车智驾人士说道。
有小鹏人士表示,现在内部压力最大的是规划控制环节。例如,小鹏之前的数据大部分是广东的,扩城之后,会遇到很多北京特有的场景。
如果要保证用户的体验一致,只能叠加各种控制规则来修改驾驶策略。小鹏智驾灵魂人物吴新宙,即便在离职前夜,也不得不为了北京的城市 NGP 落地," 北京广州来回跑。"
显然,即便是有了可行的感知技术路径,城区智驾也没有快速铺开的 " 银子弹 "。不管是模型优化还是规则调整,都是漫长而繁琐的工程化过程。
8 月 25 日的成都车展上,理想汽车副总裁刘杰悄然调整了 " 城市 NoA 开通 100 座 " 的描述,在其公布的开城明细中,将 " 城市 NoA" 改为了 " 通勤 NoA"。
相比城市 NoA 对全城区域的覆盖,通勤 NoA 模式轻量很多,用户可以自行设定 1 到 2 条通勤路线,车辆自主学习道路 NPN 特征,学成之后就可以在这些通勤路线开通 NoA 功能。" 相对简单的路线基本 1 周以内可以激活,较为复杂的路线,2-3 周也足以完成训练。" 理想表示。
小鹏也推出了类似的 "AI 代驾 " 模式,来实现今年 50 座的开城目标。" 成本又低,边际效应很大,都是用户高频使用路线。" 一位智驾行业人士表示。
BEV+Transformer 几乎提供了去掉高精地图的终局感知方案,也让智能驾驶从高速走进城市,最终通往自动驾驶。但必须承认的是,代码与算法有限,而现实场景无限,这也决定,智能驾驶是一砖一瓦的量产工程。
在激烈的口水仗过后,国内的车企们依然需要回归现实,日拱一卒。